The Vehicle Routing Problem (VRP) is widely studied in the area of combinatorial optimization, and generalizes the Traveling Salesman Problem (TSP). The main objective is to determine the best routes (sequence), according to a metric such as time or distance, to visit different locations considering a set of vehicles.
The classic formulation for such problems does not take into account many challenges that arise in real-world scenarios, such as motion constraints and dynamic environments. Therefore, several of my works consider the so-called Dubins vehicles, which have a minimum turning radius, in addition to other characteristics such as visiting regions and new points of interest added dynamically.
Dubins Traveling Salesman Problem (DTSP).
Dynamic routing to visit regions with Dubins vehicles.
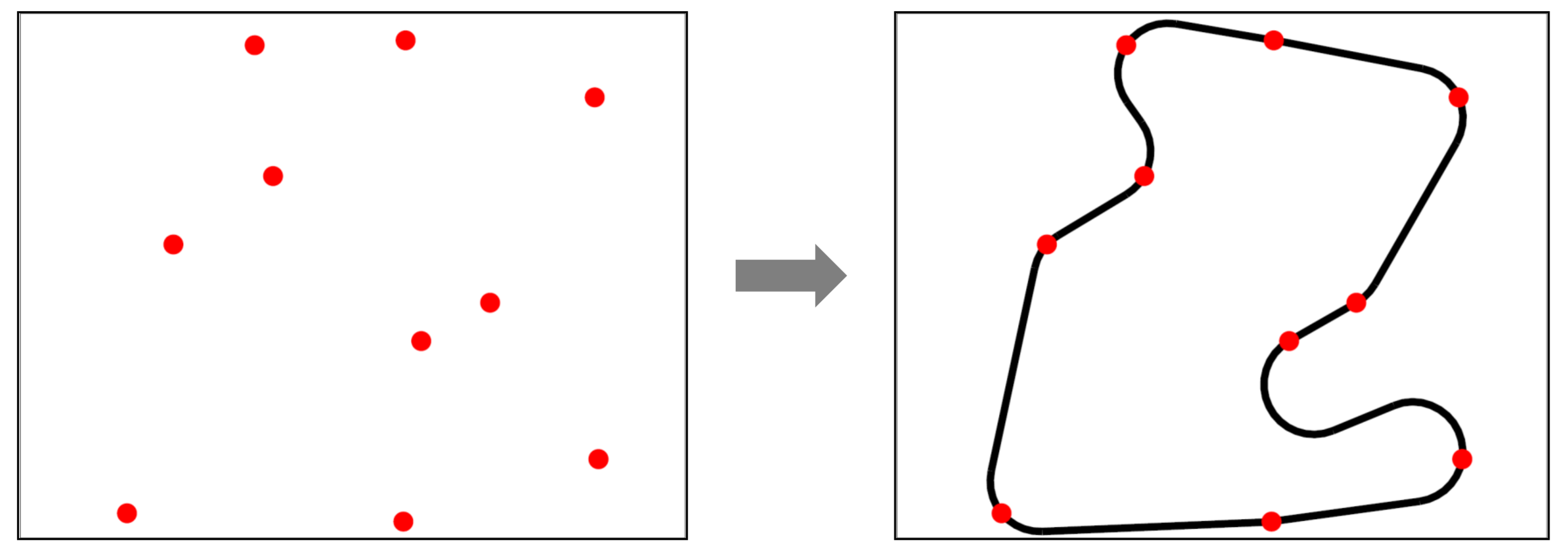
The Orienteering Problem (OP) considers two specific characteristics: (i) the vehicle has a limited travel budget; (ii) each position to be visited has a different value. In this context, important aspects to be considered are the coordination and robustness of multi-robot systems and how to consider specific properties of the environment, for example, ocean currents.
Variants of the Orienteering Problem (OP).
Path planning
A fundamental problem in Mobile Robotics is how to navigate a robot safely and efficiently from a starting point to a goal in the environment. In this context, the objective is to determine a sequence of valid configurations for the vehicle and that takes it to the desired position. Valid configurations are, for example, those that do not result in collisions and that are feasible by the vehicle (respect its restrictions).
Generation of 3D Dubins curves.
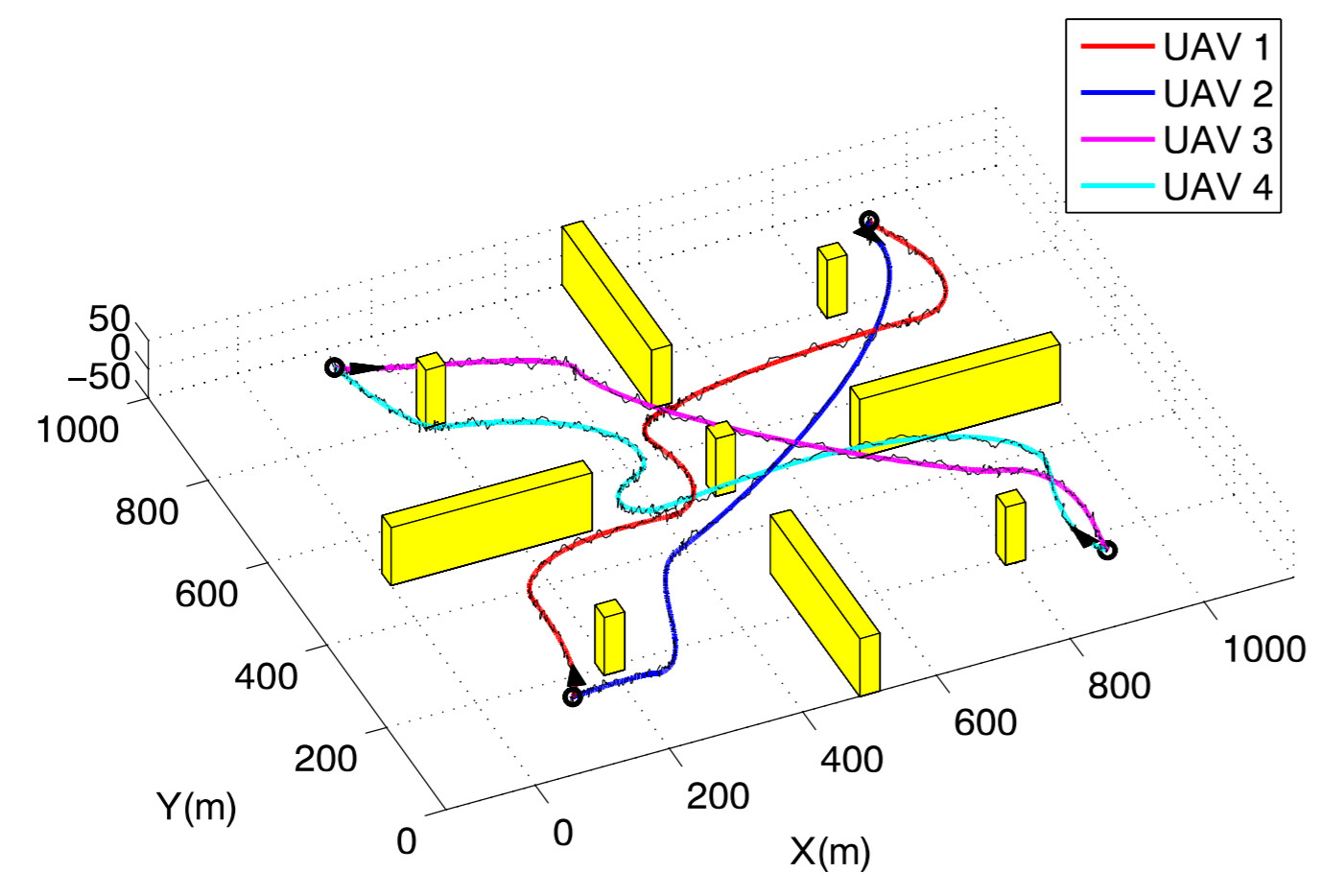
Planning and control of UAVs in an environment with obstacles.
Other restrictions may also be associated with the environment. For example, the objective can be to obtain a path that minimizes the vehicle's exposure to different types of risk, such as detection by a sensor network or locomotion through very rough terrain.
Minimal Exposure Problem (MEP) in dynamic environments.
Multi-robot systems
The use of multiple robots has several advantages over systems formed by a single robot, such as increased robustness and, in most cases, reduced time to perform a task. However, the use of multiple robots also poses many challenges, such as planning, coordination, task allocation, and control.
Consensus techniques can be used, for example, to solve the problem of rendezvous, where from different initial positions in an unknown environment the agents must meet in a finite period of time.
Consensus using random planners.
Area coverage is another classic example where these systems can help achieve a faster execution of the task.
Area coverage with multiple aerial vehicles.
Swarm Robotics
Robotic swarms are very large groups of simpler agents, with little processing power and limitations in perception and communication. Inspired by colonies of social insects, the goal is to obtain emerging behaviors from the coordination of such agents to solve complex problems.
Most of my work focuses on the development of segregative behaviors, considering objectives such as the separation of the swarm in specific groups or the maintenance of the cohesion of different groups during navigation in the environment.
Examples of segregation (left) and segregated navigation (right).
The congestion problem occurs when a large number of robots try to reach a common target in the environment at the same time. One of the objectives, for example, may be that all agents in the same group visit the target in the shortest time.
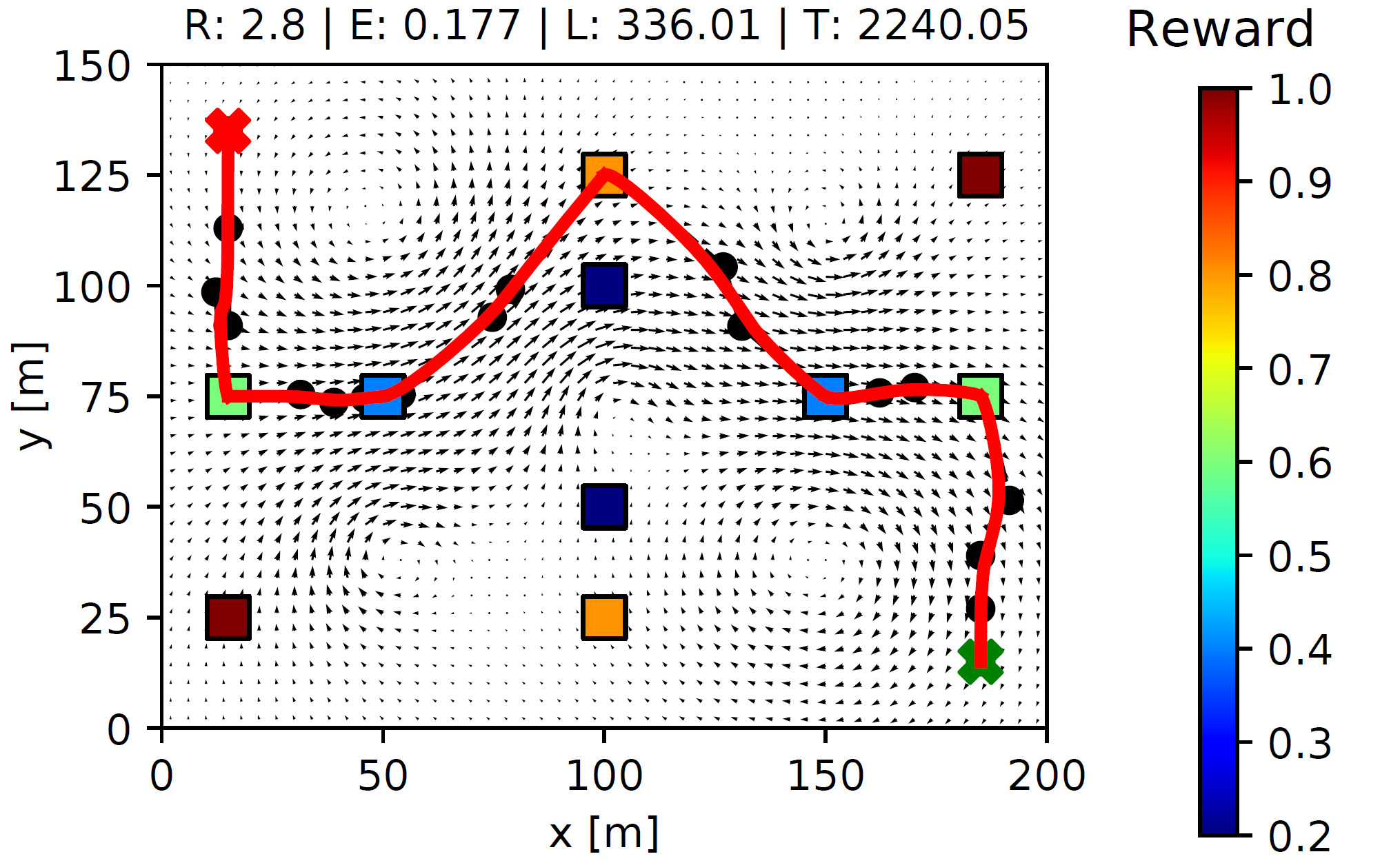
Visiting and observing specified locations is a fundamental task for applications such as environmental monitoring, surveillance, and military operations. However, traditional routing formulations may be insufficient to deal with more realistic scenarios. For example, certain applications might demand a path that avoids threatening zones in the environment.
Minimal Exposure Dubins Orienteering Problem (MEDOP).
The perimeter defense problem is a particular case regarding multi-robot systems, since we have the presence of adversarial agents, that is, agents who will be acting against the success of the entire mission.
Perimeter defense against intruder agents.
Human-Robot Interaction
Robots have increasingly migrated from controlled environments (for example, factories) to virtually unrestricted environments, where people are constantly present (for example, homes and hospitals). In this context, the Human-Robot Interaction (HRI) area studies ways for robots to have the ability to behave in a way that is socially acceptable, that is, to coexist harmoniously with humans.
In most everyday situations, people are interacting with each other in groups of two or more people. In this context, a fundamental problem is the correct identification and representation of these groups.
Determination of groups and their collective social space.
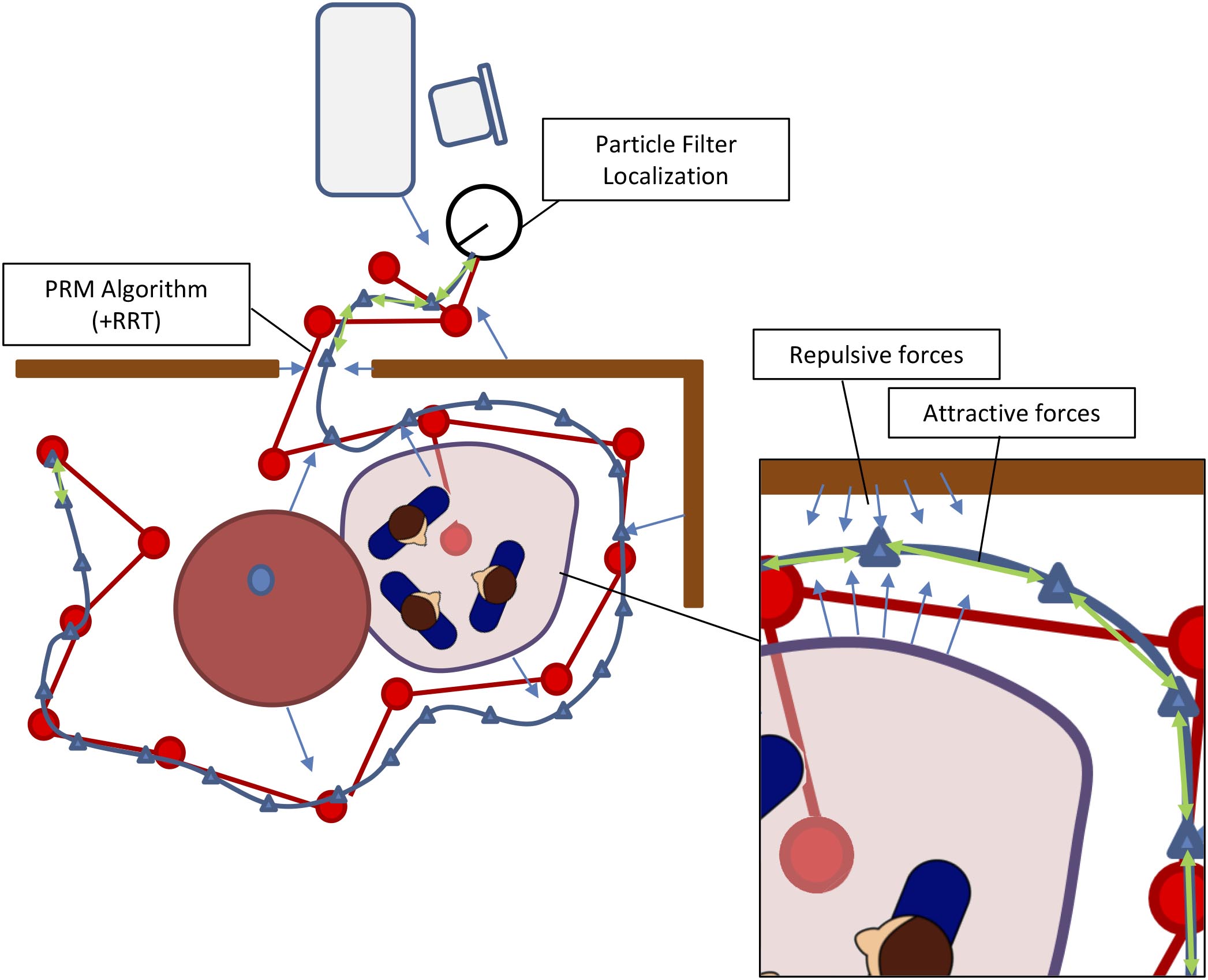
With such information, the robot would be able, for example, to determine the path with the least social impact.
Path planning with social restrictions.
Mapping and Exploration
For a robot to effectively act autonomously, it is essential that it has a complete and accurate representation of the environment, that is, a map. In the case of initially unknown environments, a fundamental step is the generation of this map, where different applications may require specific exploration strategies and the representation of different types of information.
Magnetic surveys are an essential information for professionals in different areas: (i) in geology, to detect anomalies due to minerals of commercial interest under the ground; (ii) in the armed forces, to find unexploded ordnance (UXO); (iii) in archeology, to create maps of buried artifacts.
Three-dimensional reconstruction and magnetic mapping.
External natural environments are challenging for ground robots, as they exhibit heterogeneous rough surfaces, including vegetation, sand, mud, etc. One solution is to augment the maps with terrain information, allowing the robot to estimate the navigation cost (difficulty) of crossing different areas.
Classification and mapping of outdoor terrain navigation costs.
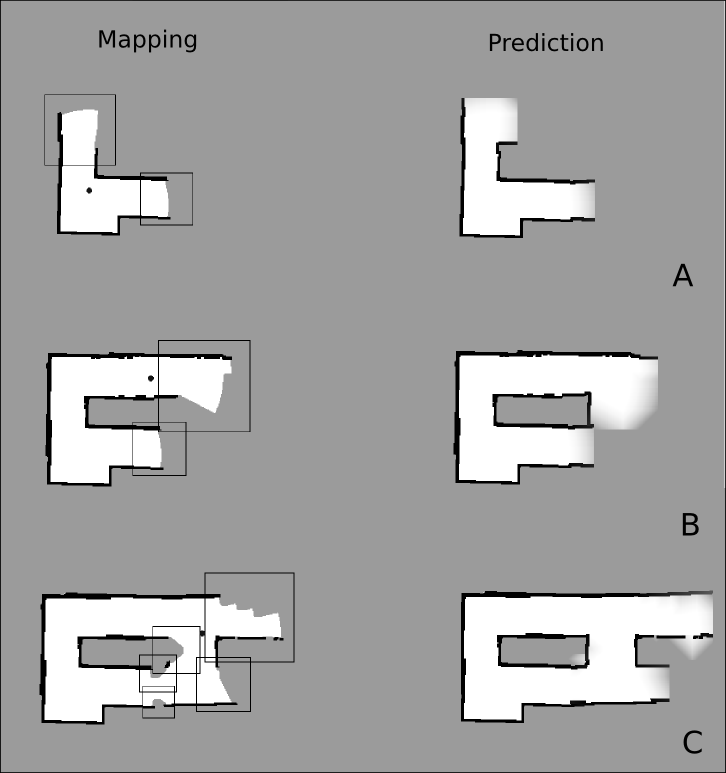
Regarding exploration, one of the main problems is determining the next destinations to visit for mapping, and the strategies are generally based on the concept of information gain. Therefore, a great challenge is to be able to estimate how much information is added to the map when visiting a certain position.
Frontiers prediction in indoor environments.
Manipulation and Transport
In the mining industry, teleoperation is an important intermediate step towards the total automation of this activity. An effective approach to improve performance in teleoperation tasks is the use of so-called haptic feedback, that is, the feeling of force when manipulating something.
Teleoperation with force feedback.
The use of robots capable of handling and transporting objects has grown, mainly seeking to improve yield and gains in different scenarios, for example, more efficient management of warehouses.