O Problema de Roteamento de Veículos (VRP) é muito estudado na área da otimização combinatória, e generaliza o Problema do Caixeiro Viajante (TSP). O objetivo principal é determinar as melhores rotas (sequência), de acordo com uma métrica como tempo ou distância, para visitar diferentes locais considerando um conjunto de veículos.
A formulação clássica para tais problemas não leva em conta muitos desafios que surgem em cenários do mundo real, como restrições de movimento e ambientes dinâmicos. Logo, vários de meus trabalhos consideram os chamados veículos Dubins, que possuem um raio mínimo de curvatura, além de outras características como regiões de visita e novos pontos de interesse adicionados dinamicamente.
Dubins Traveling Salesman Problem (DTSP).
Roteamento dinâmico para visita a regiões com veículos Dubins.
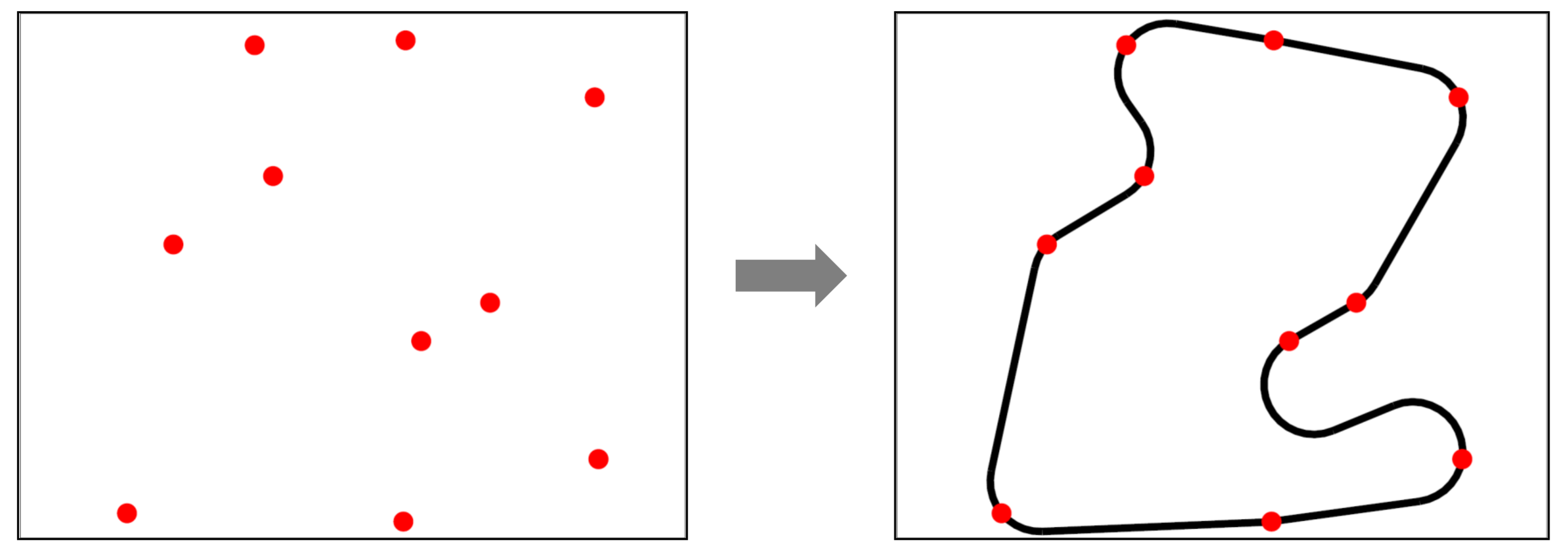
O Orienteering Problem (OP) já considera duas características específicas: (i) o veículo possui um limite máximo de deslocamento; (ii) cada posição a ser visitada possui um valor diferente. Nesse contexto, aspectos importantes a serem considerados são a coordenação e robustez de sistemas multi-robôs e como considerar propriedades específicas do ambiente, por exemplo, correntes oceânicas.
Variações para o Orienteering Problem (OP).
Planejamento de caminhos
Um problema fundamental na Robótica Móvel é como navegar um robô de maneira segura e eficiente de um ponto inicial até um final no ambiente. Nesse contexto, o objetivo é determinar uma sequência de configurações válidas para o veículo e que o leve até a posição desejada. Configurações válidas são, por exemplo, aquelas que não resultam em colisões e que são factíveis pelo veículo (respeitam suas restrições).
Geração de curvas Dubins 3D.
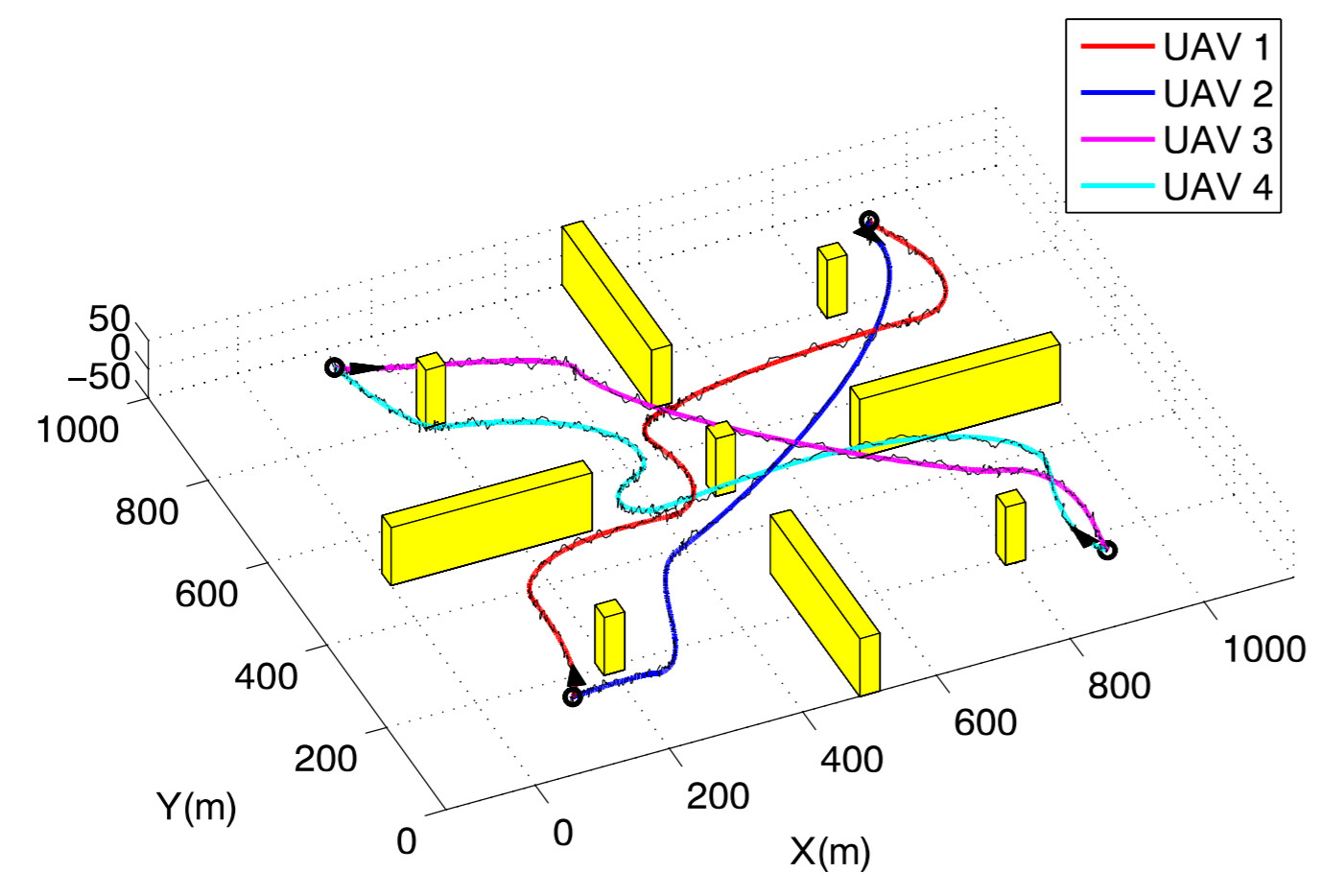
Planejamento e controle de UAVs em ambiente com obstáculos.
Outras restrições também podem estar associadas ao ambiente. Por exemplo, o objetivo pode ser um caminho que diminui a exposição do veículo a diferentes tipos de risco, como a detecção por uma rede de sensores ou locomoção por terrenos muito acidentados.
Minimal Exposure Problem (MEP) em ambientes dinâmicos.
Sistemas multi-robôs
O uso de múltiplos robôs apresenta várias vantagens em relação a sistemas formados por um único robô, como maior robustez e, na maioria dos casos, redução no tempo
para se realizar uma tarefa. No entanto, o uso de vários robôs também traz muitos desafios, como planejamento, coordenação, alocação de tarefas e controle.
Técnicas de consenso podem ser usadas, por exemplo, para resolver o problema de rendezvous, onde a partir de posições iniciais distintas em um ambiente ambiente desconhecido os agentes devem se encontrar em um intervalo de tempo finito.
Consenso usando planejadores aleatórios.
Cobertura de área é outro exemplo clássico onde esses sistemas podem ajudar a realizar a tarefa mais rapidamente.
Cobertura de área com múltiplos veículos aéreos.
Robótica de enxame
Os enxames robóticos são formados por um grande número de agentes mais simples, com pouco poder de processamento e limitações de percepção e comunicação. Inspirados por colônias de insetos sociais, o objetivo é obter comportamentos emergentes a partir da coordenação dos agentes para resolver problemas complexos.
A maioria dos meus trabalhos foca do desenvolvimento de comportamentos segregativos, considerando objetivos como a separação do enxame em grupos específicos ou a manutenção da coesão de diferentes grupos no enxame durante a navegação no ambiente.
Exemplos de segregação (esquerda) e navegação segregada (direita).
O problema de congestionamento ocorre quando um grande número de robôs tenta alcançar um alvo comum no ambiente ao mesmo tempo. Um dos objetivos, por exemplo, pode ser que todos os agentes de um mesmo grupo visitem o alvo no menor intervalo de tempo.
Congestionamento de alvo considerando enxames heterogêneos.
Segurança e Defesa
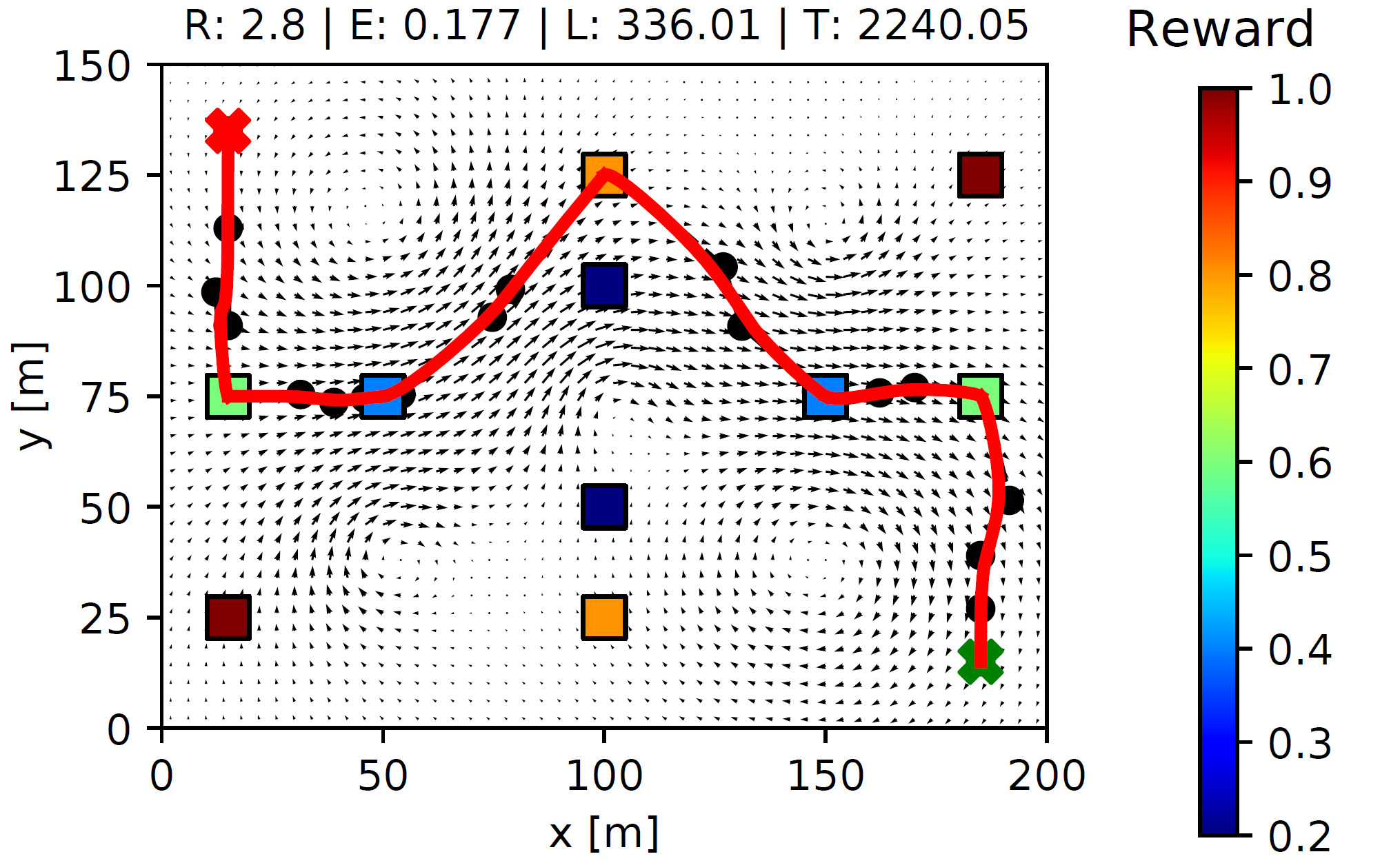
Visitar e observar locais é uma tarefa fundamental para aplicações como monitoramento ambiental, vigilância e operações militares. No entanto, formulações tradicionais de roteamento podem ser insuficientes para lidar com cenários mais realistas. Por exemplo, certas tarefas podem exigir um caminho que evite zonas de risco no ambiente.
Minimal Exposure Dubins Orienteering Problem (MEDOP).
O problema de defesa de perímetro é caso particular na aplicação de sistemas multi-robôs, uma vez que temos a presença de agentes adversariais, ou seja, agentes que estarão agindo contra o sucesso de toda a missão.
Defesa de perímetro contra agentes invasores.
Interação Humano-Robô
Robôs tem cada vez mais migrado de ambientes controlados (por exemplo, fábricas) para ambientes praticamente sem restrições, onde pessoas estão constantemente presentes (por exemplo, casas e hospitais). Nesse contexto, a área de Interação Humano-Robô (HRI) estuda formas para que os robôs possuam a capacidade de se comportarem de uma maneira denominada socialmente aceitável, ou seja, co-existindo de maneira harmoniosa com os humanos.
Na maioria das situações cotidianas, as pessoas estão interagindo umas com as outras em grupos de duas ou mais pessoas. Nesse contexto, um problema fundamental é a correta identificação e representação desses grupos.
Determinação de grupos e espaço social coletivo.
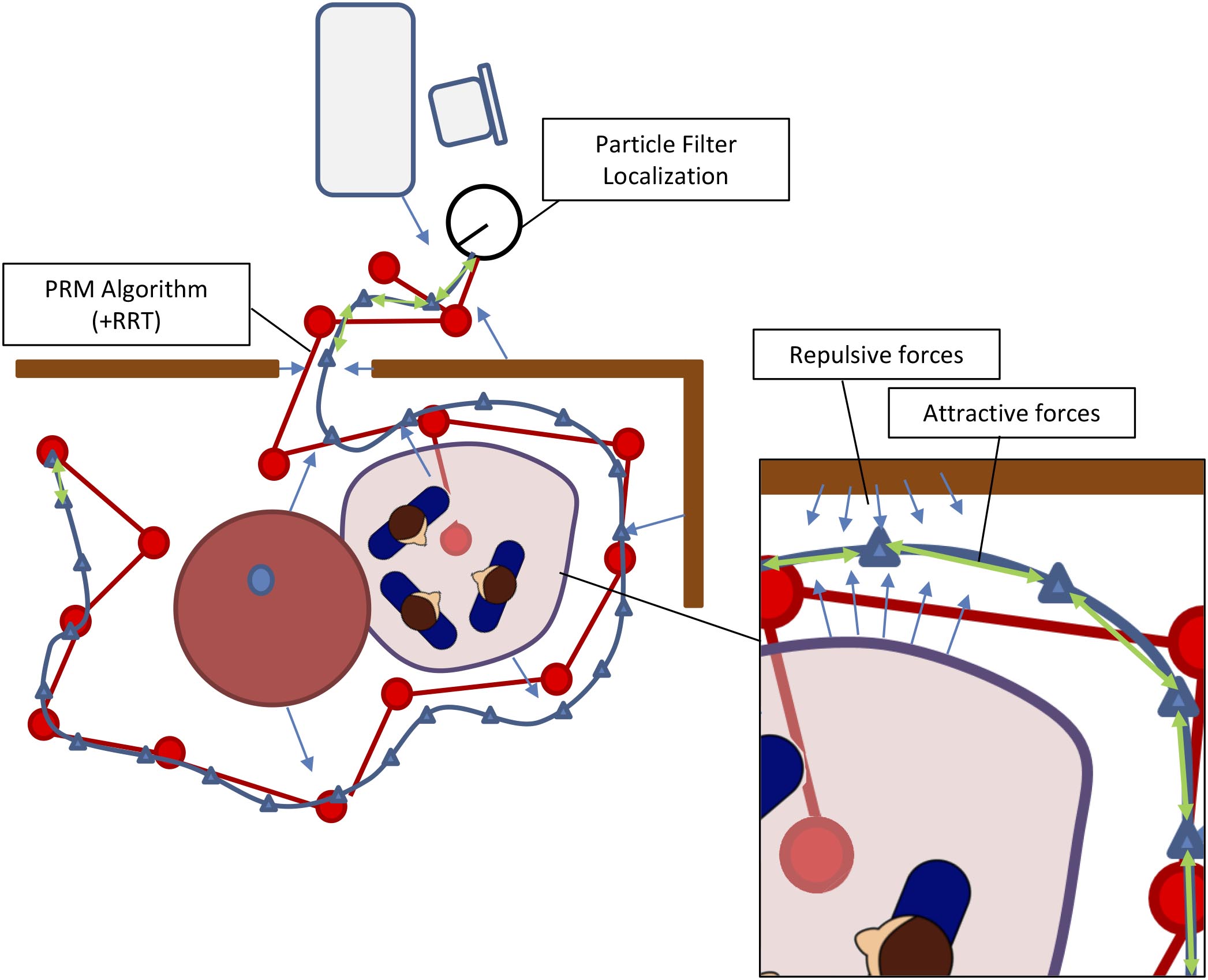
Com tal informação, o robô seria capaz de, por exemplo, determinar o caminho que terá o menor impacto social.
Planejamento de caminhos com restrições sociais.
Mapeamento e Exploração
Para que um robô consiga efetivamente atuar de maneira autônoma, é fundamental que esse possua uma representação completa e precisa do ambiente, ou seja, um mapa. No caso de ambientes inicialmente desconhecidos, um passo fundamental é justamente a geração desse mapa, onde diferentes aplicações podem exigir estratégias específicas de exploração e assim como a representação de diferentes tipos de informação.
Levantamentos magnéticos são informações essenciais para profissionais de diferentes áreas: (i) em geologia, para detectar anomalias pertencentes a minerais de interesse comercial sob o solo; (ii) nas forças armadas, para encontrar munições não detonadas (UXO); (iii) em arqueologia, para criar mapas de artefatos enterrados.
Reconstrução tridimensional e mapeamento magnético.
Ambientes naturais externos são desafiadores para robôs terrestres, pois exibem superfícies de rugosidade heterogênea, incluindo vegetação, areia, lama, etc. Uma solução é incrementar os mapas com informações do terreno, permitindo ao robô estimar o custo de navegação (dificuldade) de atravessar diferentes áreas.
Classificação e mapeamento do custo de navegação em terrenos externos.
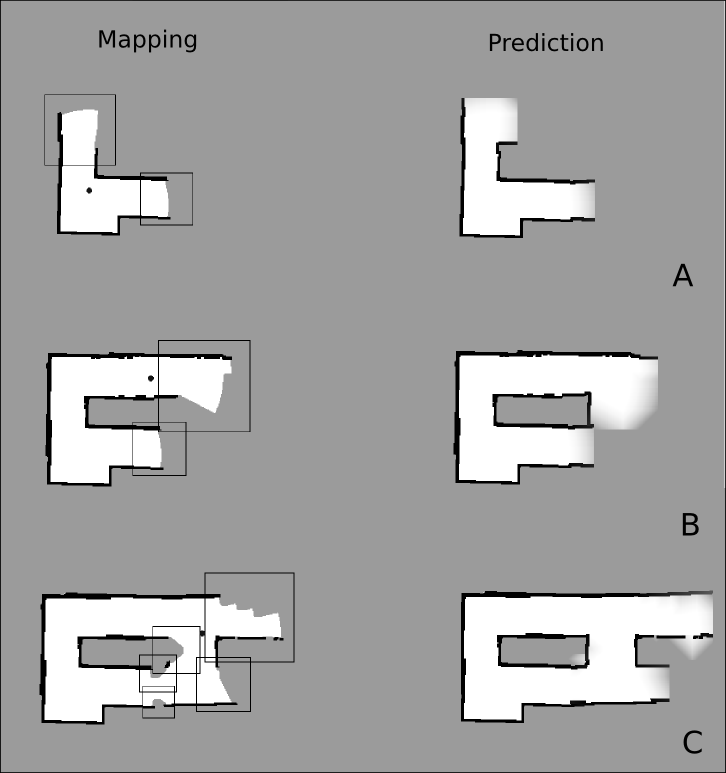
No contexto de exploração, um dos principais problemas é determinar os próximos destinos a se visitar para o mapeamento, e as estratégias geralmente são baseadas no conceito de ganho de informação. Logo, um grande desafio é conseguir estimar quanta informação é agregada ao mapa ao se visitar determinada posição.
Predição de fronteiras em ambientes internos.
Manipulação e Transporte
Na indústria de mineração, a teleoperação é um passo intermediário importante para a automação total dessa atividade. Uma abordagem eficaz para melhorar o desempenho em tarefas de teleoperação consiste no uso do chamado feedback háptico, ou seja, a sensação de força ao se manipular algo.
Teleoperação com realimentação de força.
O uso de robôs capazes de manipular e transportar objetos tem crescido, principalmente buscando melhorar o rendimento e ganhos em diferentes cenários, por exemplo, um gerenciamento mais eficiente de armazéns.